Project Title: Teaching Key Robotics Concepts with the Help of Low-Cost Manipulator and Augmented Reality
Funding programme: Creation of Educational Material in Robotics and Automation (CEMRA), IEEE Robotics and Automation Society Budget: $8,500. Additional funding from QMUL: $4,000.
Contributors: Dr Ildar Farkhatdinov, Mr Ata Otaran, Mr Fadi Katerji, Mr Eisa Anwar
In 2019 IEEE Robotics and Automation Society has funded our project on developing low-cost robotics education solution for learning kinematics and control. The project was delayed due to COVID-19 restrictions and was restarted in summer 2021. This webpage will be updated by Spring 2022 to include the proposed educational material.
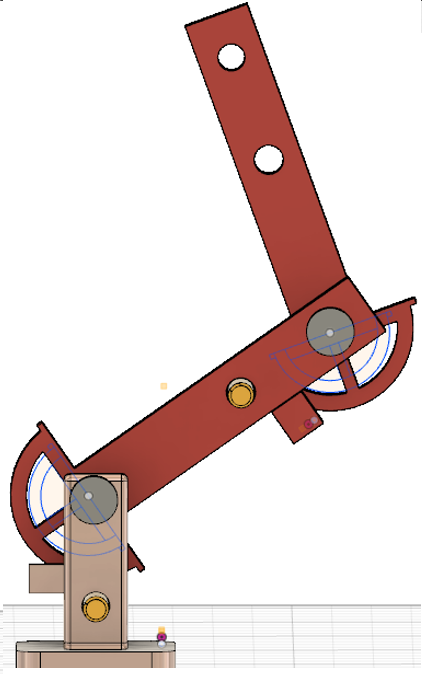
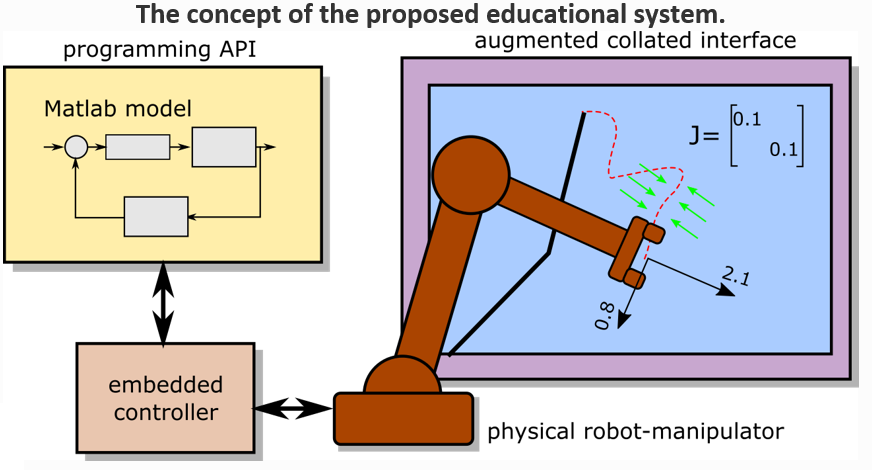
Summary. We proposed to develop and use a two-link manipulator robot together with context-based tangible visual display to interactively teach robot kinematics, control and motion planning. The system is be composed of an actuated mechanism with real-time embedded controller, a computer screen for collocated display and a dedicated application programming interface (API) based on MATLAB/Simulink MathWorks.
Open Access teaching material
The following material to be added/updated by Spring 2022:
- Robotic system design and manufacturing.
- CAD files for 3D printing/laser cutting.
- Video on CAD and manufacturing.
- Electronic components and system integration.
- DC-motors and position sensing.
- Microcontroller.
- Integration and quick testing.
- Theory.
- DC motor dynamics and control.
- 1-DoF Robotic mechanism, kinematics and dynamics.
- Position feedback control of a robotic mechanism with PID regulator.
- Implementing control and analysis.
- Software and open source code.
- Controller testing and adjustments.
- Analysis.
- Teaching materials.
- Videos
- Notes.